Yade বিশেষত বিচ্ছিন্ন এলিমেন্ট পদ্ধতি জন্য ডিজাইন করা বিযুক্ত সংখ্যাসূচক মডেলের জন্য ব্যবহার করা যেতে পারে যে একটি ফ্রি, ওপেন সোর্স এবং এক্সটেনসিবল কাঠামো, হয়. Yade এর গুনতি যন্ত্রাংশ নতুন ইন্টারফেস এবং আলগোরিদিম স্বাধীন বাস্তবায়ন পারবেন যা নমনীয় অবজেক্ট মডেল সাহায্যে C ++ এ লেখা হয়েছে.
তবুও আরেকটি ডায়নামিক ইঞ্জিন
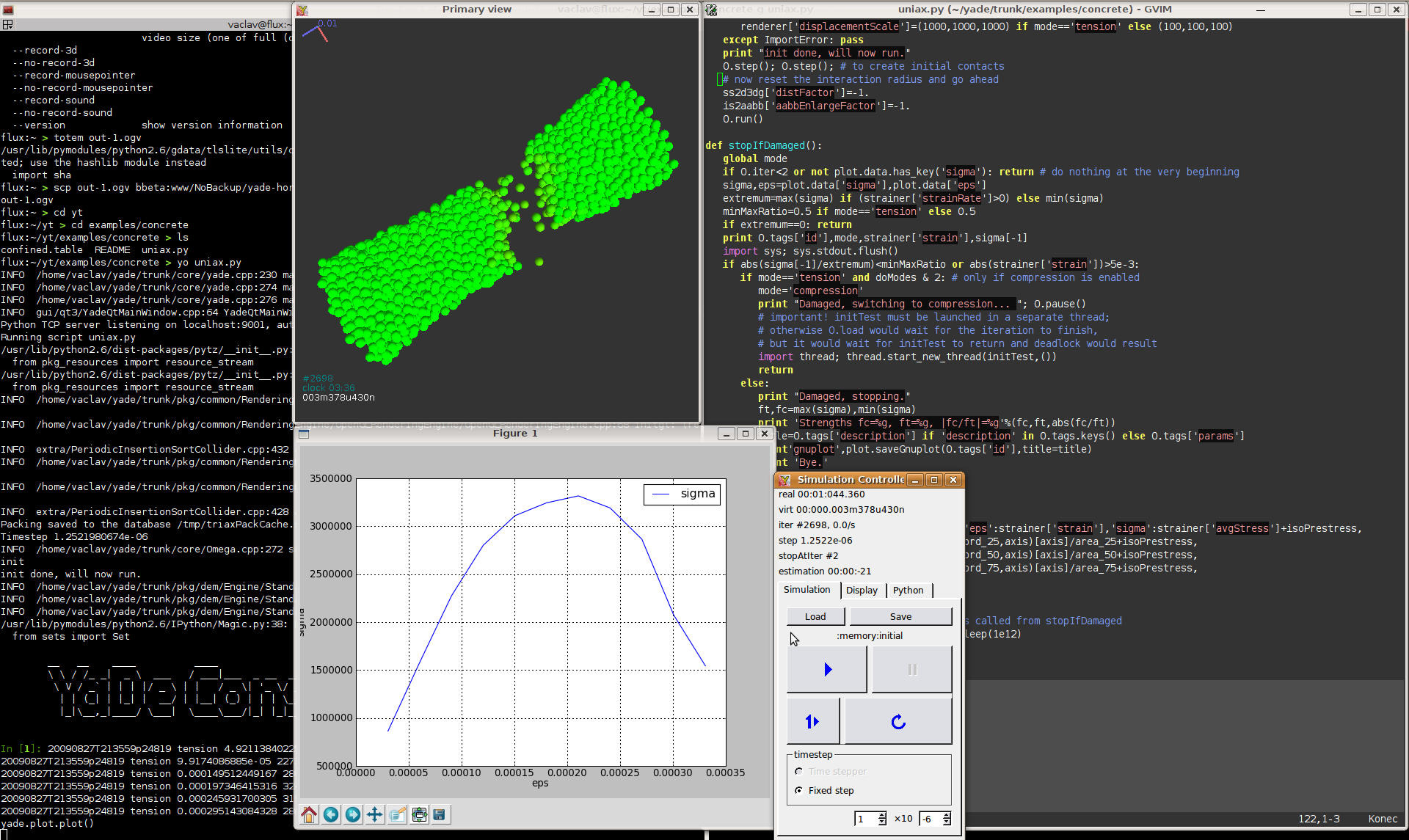
Yade তবুও আরেকটি ডায়নামিক ইঞ্জিন ঘোরা, এবং এটা সংক্ষিপ্ত এবং দ্রুত ঘটনাস্থলে নির্মাণ, পোস্ট-প্রসেসিং, ডিবাগিং, সেইসাথে সিমুলেশন নিয়ন্ত্রণ জন্য পাইথন ব্যবহার করে. সফটওয়্যার উবুন্টু লিনাক্স অপারেটিং সিস্টেমের জন্য সোর্স আর্কাইভ হিসাবে, সেইসাথে লঞ্চপ্যাড মাধ্যমে, GitHub মাধ্যমে বিতরণ করা হয়.
ফণা অধীন
Yade (তবুও আরেকটি ডায়নামিক ইঞ্জিন) এর ফণা অধীন একটি দ্রুত বর্ণন আবেদন সি ++ এবং পাইথন প্রোগ্রামিং ভাষায় লেখা হয়েছে যে আমাদের দেখাতে হবে. এটি আনুষ্ঠানিকভাবে উবুন্টু সহ লিনাক্সের বিভিন্ন ডিস্ট্রিবিউশন জনপ্রিয়, সঙ্গে পরীক্ষা করা হয়. উভয় 32 বিট এবং 64-বিট হার্ডওয়্যার প্ল্যাটফর্ম এই সময়ে সমর্থিত.
Yade দিয়ে শুরু হচ্ছে
Softoware উপর দেওয়া সংরক্ষণাগার, হয় আপনার বিতরণের ডিফল্ট সফটওয়্যার ভান্ডার থেকে প্রাক বিল্ট বাইনারি প্যাকেজ ব্যবহার করে বা ইউনিভার্সাল সূত্র ব্যবহার করে আপনার গনুহ / লিনাক্স কম্পিউটারে এই প্রোগ্রামটি ইনস্টল করার দুটি উপায় আছে.
একটি টার্মিনাল এমুলেটর খুলুন এবং নিষ্কাশিত ফাইল অবস্থান নেভিগেট, আপনার পাথ উপর কোথাও তা নিষ্কাশন, tarball রূপে (tar.gz) ফাইল ডাউনলোড করুন. . Cmake & rdquo; তারপর, & ldquo চালানো; (উদ্ধৃতি চিহ্ন বিনা) কমান্ড & ldquo দ্বারা অনুসরণ প্রকল্প, কনফিগার করার; করতে & rdquo; কমান্ড, কোট ছাড়া, অবশ্যই, সফটওয়্যার কম্পাইল হবে.
আপনি সূত্র আর্কাইভ ব্যবহার করে আপনার কম্পিউটারে আবেদন স্থাপন করার জন্য তাদের সব ইনস্টল করতে হবে যেমন উপরোক্ত ব্যাখ্যা হিসাবে
, Yade প্রয়োজনীয়তা সচেতন হতে হবে. একটি সফল সংকলন করার পর, আপনি & ldquo চালানো হবে; ইনস্টল করুন & rdquo করতে; উদ্ধৃতি চিহ্ন বিনা, পরিচয়ে কমান্ড. আপনি Yade ইনস্টল করার চেষ্টা করার সময় যদি আটকে যান সরকারী ডকুমেন্টেশন অনুগ্রহ করে পড়ুন
এই রিলিজে নতুন আপনি কি:.
- <লি> রিলিজ ফাইল মুছে ফেলুন.
- সতর্কবাণী সংশোধন করা হয়েছে.
<লি> ENABLE_PROFILING বিকল্প যোগ করুন - আরো কম্পাইলেশন সতর্কবার্তা ত্রুটিমুক্ত.
- আরো কম্পাইলেশন সতর্কবার্তা ত্রুটিমুক্ত.
<লি> CMakeLists.txt ক্ষুদ্র ফিক্স করুন - রিলিজ ফাইল মুছে ফেলুন
<লি> DEM এর PFV চেক ব্যবহারের toleranceWarning এবং toleranceCritical.
<লি> সরানোর বোঝায় পর ক্র্যাশ. বন্ধ এলপি: 1354433 করুন - & quot অক্ষীয়-স্বাভাবিক ছে জেনারেট করার জন্য অ্যাড saveLatticeNode ফাংশন; 0 & quot; এবং & quot; 1 & quot;
<লি> অ্যাড isWaterReservoir, isAirReservoir.
<লি> নিষ্কাশন জন্য অন্য সংস্করণ যোগ করুন.
<লি> invadeSingleCell2 জন্য মুছুন অপ্রয়োজনীয় Recursion ()
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন - অ্যাড solidLine. আংশিক বল জন্য কোড.
<লি> পরিষ্কার কোড, Facet_Force উপর ভুল ঠিক.
<লি> তরল বলপূর্বক কম্পিউটিং একটি পরীক্ষামূলক সংস্করণ.
<লি> solidLine [আমি] [ঞ] যখন facetNFictious ক্ষেত্রে (1). ঠিক
<লি> ফিক্স noCache.
<লি> ফিক্স solidLine [আমি] [ঞ] যখন facetNFictious ক্ষেত্রে (2).
<লি> -পরিচ্ছন্ন কোড.
<লি> ফিক্স জলাধার attr. boundcells.isWaterReservoir = সত্য পরিবর্তন যখন ফিনিস ড্রেনেজ.
<লি> পরিষ্কার কোড.
<লি> যোগ টেম্প পরীক্ষা Func.
<লি> cell- & জি.টি. যোগ; তথ্য () trapCapP. আটকে ফেজ জন্য ফিক্স চাপ হিসাব.
<লি> পরিষ্কার কোড.
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন - ফিক্স কোর ডাম্প, currentTes solver- & জি.টি. হতে shoule; টি [solver- করুন & gt; currentTes], না solver- করুন & gt; টি [currentTes]
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন - .
<লি> ফিক্স জলাধার নির্ধারণ; ) (আক্রমণ ঠিক, PW ঋণাত্মক হতে পারে (mode1)
<লি>, নিয়ম আক্রমণ আক্রমণ নির্ধারণ bndCondValue ব্যবহার পরিবর্তন করুন. reservoirInfo bndCondValue উপর নির্ভর করে; isInvadeBoundary একত্রীকরণ. (mode1)
<লি> mode2 জন্য নিয়ম আক্রমণ-পরিবর্তন করুন. কিছু ফাংশন একত্রীকরণ করুন - এই TwoPhaseFlowEngine (আলফা সংস্করণ) হয় হ্যা!
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন - 1D RANS কোড সাথে দম্পতি Yade যাও নতুন বল ইঞ্জিন. শুধুমাত্র গভীরতার উপর নির্ভর করে, যা একটি 1D গড় তরল বেগ ভেক্টরের ফাংশন প্রধান শক্তিশাস্ত্র বা শক্তিশাস্ত্র সংক্রান্ত বাহিনী প্রয়োগের একটি নতুন বাহিনী ইঞ্জিন যুক্ত করো. ইঞ্জিন প্রতিটি কণা জন্য ড্র্যাগ, লিফট এবং প্রাণবন্ত বাহিনী ধাপে প্রতিটি সময়ে গণনা করা হয়. ইঞ্জিন যুক্ত ডকুমেন্টেশন জন্য রেফারেন্স সমাপ্তি.
<লি> টি Sweijen (1):
<লি> Merge দুই ফেজ প্রবাহ ইঞ্জিন করুন - টাইপস এবং precisions করুন
- রিলিজ ফাইল মুছে ফেলুন
<লি> করো -ftrack-ম্যাক্রো-সম্প্রসারণ = 0, জিসিসি ও GT যদি; = 4.8
<লি> VTK6-সহায়তা প্রদান.
পরিবর্তে CXX_FLAGS সরাসরি যারা যোগ করার <লি> ব্যবহার ADD_DEFINITIONS.
<লি> yade স্টেবল Readme থেকে সম্পর্কিত তথ্য মুছে ফেলুন. - নতুন কাইনেম্যাটিক গতি হিসাবে BicyclePedalEngine করো.
জিসিসি-4.8 ব্যবহার করা হয় তাহলে <লি> সংরক্ষণ-তেম্প্স করো.
<লি> গ্রিড এবং Grid_GUI বিভক্ত গ্রিড.
<লি> ডকুমেন্টেশন এবং বাহ্যিক পিপিএ মধ্যে প্যাকেজ অনুপস্থিত সম্পর্কে তথ্য যোগ করুন. বন্ধ: এলপি: 1250928 করুন - উবুন্টু সংস্করণ জন্য othermirror ব্যবহার করুন.
<লি> STL-GTS উদাহরণস্বরূপ করো.
<লি> বোঝায়-উদাহরণে qt.View () যুক্ত করো.
<লি> ViscoElastic প্রধানমন্ত্রীর কার্যকারিতা পরীক্ষা করার এক চেক-স্ক্রিপ্ট যোগ করুন.
<লি> ViscoElasticPM প্যারামিটার হিসাবী, massMultiply-পরামিতি বিবেচনা করুন.
<লি> সংরক্ষণ ফাংশন এবং লোড বোঝায় করো.
<লি> স্ব-কম্পাইল মডিউল sys.path উচ্চতর pripority সেট. বন্ধ এলপি: 1254708 করুন - কোন গোলকের নিয়মিত * কমান্ড দ্বারা উত্পাদিত হয় তাহলে, সতর্কতা বাড়াতে.
<লি> দৈনিক-প্যাকেজ সম্পর্কে তথ্য আপডেট করা হবে.
<লি> এক সেট আরো paramter -ftemplate গভীরতা-512 ঝনঝন করুন জন্য - ক্ষুদ্র বিন্যাস.
<লি> cout ঘটনাক্রমে একটি পূর্ববর্তী মধ্যে এখনো যোগ করেনি. কমিট.
<লি> utils.py মধ্যে setFromTwoVectors ক্ষুদ্র পরিবর্তনের.
<লি> buildppa.py করতে createtar.py পুনঃনামকরণ.
ডক্স - গৌণ ফিক্স.
<লি> রিলিজ-ফাইল যোগ করুন. - ফাংশন একটি একক গোলক মাপ বৃদ্ধি (~ করুন & gt; টমাস ফোলা)
<লি> TesselationWrapper রাষ্ট্র ফাইল সহজ ম্যানিপুলেশন করুন - সংশোধন ভুল
<লি> - (আসলে uncommenting) পরিচয় দশ / shearBreakRel JCFpmState ভেরিয়েবল: ভাঙ্গা কথাবার্তাও শরীরের প্রতি (পরিবর্তে পরম সংখ্যা) আপেক্ষিক অংশ. -. JCFpm ভেরিয়েবল কিছু ডক খুব কমই পরিবর্তন করুন - এই থ্রেড (https://lists.launchpad.net/yade-dev/msg10185.html), ধন্যবাদ আন্তন আলোচনার পর, কিছু মন্তব্য লাইন পুনরায় করা. মন্তব্য সমাধান (মুহূর্তে?) অবশেষে এখনও VTKRecorder একটি নতুন পরিবর্তনশীল নির্বাণ এড়ানোর জন্য ব্যবহার করা ..
<লি> JCFpm জন্য একটি স্ক্রিপ্ট যেমন: ল্যাবরেটরি পরীক্ষায় ভালো মাঝখানে এক যৌথ সঙ্গে দুই রক যন্ত্রাংশ, - উদাহরণস্বরূপ স্ক্রিপ্ট কিছু ভুলে সংশোধন, তারা এখনও JCFpm আজ পরিবর্তনের পর কাজ যাতে
<লি> JCFpm ডক মধ্যে কিছু সংশোধন (লিঙ্ক ...)
<লি> (আশা) DEM এর পৃষ্ঠভূমি ডক মধ্যে কিছু প্রথম লিঙ্ক ফিক্সিং করুন - আন্তন Gladky:
<লি> বুস্ট সিস্টেম-কম্পোনেন্ট যোগ লিঙ্ক করা.
<লি> getViscoelasticFromSpheresInteraction (ডকুমেন্টেশন) সমীকরণ ফিক্স টাইপো. Medack (TU Freiberg) ধন্যবাদ.
<লি> স্পষ্টভাবে লিঙ্ক BZip2-লাইব্রেরি
<লি> স্পষ্টভাবে লিঙ্ক Zlib-লাইব্রেরি
<লি> আপডেট ইনস্টলেশন ডক্স, libbz2-দেব zlib1g-দেব যোগ করুন.
<লি> ফিক্স LudingPM.
<লি> LudingPM (Theta- করুন & gt; ডেল্টা) ভেরিয়েবল নামান্তর.
<লি> LudingPM ফিক্স K2-হিসাব.
<লি> LudingPM জন্য হালনাগাদ স্ক্রিপ্ট.
<লি> স্প্লিট GUI / qt4 / GLViewer.cpp.
<লি> pkg / ডেমোক্রাটিক / DomainLimiter সরান. *
<লি> DomainLimiter (LawTester কোথাও স্থানান্তরিত করা উচিত) উদ্ধার করুন. - সতর্কবার্তা মুছে ফেলুন.
SVN থেকে <লি> আপডেট numpy_boost.hpp.
<লি> সরান PY, সিপিপি ও এইচ-ফাইল উপর বিট সঞ্চালন করে.
<লি> স্প্লিট Shop_01.cpp উপর Shop.cpp এবং Shop_02.cpp করুন - ফিক্সিং / আপডেটিং refs এবং লিঙ্ক - পার্ট 1
ব্যবহারকারীদের কাছ থেকে <লি> মুছে SpherePadder বিবরণ ম্যানুয়াল
ব্যবহারকারী ম্যানুয়াল - ফিক্সিং / আপডেটিং refs এবং লিঙ্ক - অংশ 2 (সমাপ্ত)
<লি> নতুন O.forces.addF () পদ্ধতি সঙ্গে প্লবতা উদাহরণস্বরূপ মানিয়ে এবং এটা nicer করুন বানাতে - ছোট ফিক্স করুন
- ভেক্টর শুধুমাত্র গোলকের মধ্যে পারস্পরিক ক্রিয়ার সংরক্ষণ করুন.
<লি> প্রতিটি মিথস্ক্রিয়া শিয়ার ও স্বাভাবিক সান্দ্র চাপ পেতে.
<লি> জানুয়ারী Stransky:
<লি> প্রান্তিক পরিবর্তন করুন - আন্তন Gladky (42):
<লি> মুক্তি-ফাইল মুছে ফেলুন.
<লি> eigen2 সরান. পরিবর্তে eigen3 ব্যবহার করুন.
<লি> সম্ভবত / unlekely নির্দেশনা সরান.
<লি> eigen2-সামঞ্জস্য সরান.
ঝনঝন সঙ্গে <লি> ফিক্স সংকলন.
<লি> সিস্টেম-প্যাকেজ minieigen, এটা চলতেই থাকে.
__init - ফিক্স টাইপো __. PY করুন
- ফিক্স টাইপো.
Cmake - ফিক্স টাইপো.
<লি> _gts মডিউল ফিক্স লিংকেজ.
<লি> GUI মধ্যে আমদানি minieigen / qt4 / SerializableEditor.py.
<লি> ক্লিন স্ক্রিপ্ট / README. প্রাসঙ্গিক কোনো আরো.
<লি> জনস্বার্থ মডিউল আমদানি করা হয় তাহলে সতর্কীকরণ বাড়াতে. একটি ত্রুটি উত্থাপন না.
<লি> 3 য় পক্ষের লাইব্রেরি (minieigen এবং GTS) সম্পর্কে ডকুমেন্টেশন সরান.
<লি> স্ট্যান্ডার্ড জায়গায় ডকুমেন্টেশন ইনস্টল করুন.
<লি> নির্মাণ করা হয় এবং pandoc উপলব্ধ হলে, Yade.epub ইনস্টল করুন.
<লি> স্পিংক্স-নির্মাতা ব্যবহার Yade.epub তৈরি করুন.
<লি> টেক্স-ফাইলের pandoc রূপান্তর সরাতে.
এইচটিএমএল ডকুমেন্টেশন জন্য <লি> ফিক্স ইনস্টলেশন পাথ.
<লি> yade ব্যাচের জন্য --version প্যারামিটার ঠিক করুন.
<লি> & quot কমা সরান; বৈশিষ্ট্য. & Quot;
<লি> আপডেট --help আউটপুট.
<লি> ব্যবহার করুন & quot manpages তৈরি করুন; র manpage করুন & quot করতে; কমান্ড.
<লি> র manpage usign --generate-র manpage বিকল্প উৎপাদিত সরান.
<লি> যোগ করুন & quot; & quot করতে; কমান্ড স্ট্যান্ডার্ড পরীক্ষা চালানো.
<লি> বৈশিষ্ট্য ফিক্স বিভাজন. (প্রচেষ্টা এলপি: 1161451)
<লি> 4f9f8dae3 চালু পরিবর্তন প্রত্যাবর্তন.
<লি> লগিং সম্পর্কে তথ্য মুছে ফেলবো. (প্রচেষ্টা এলপি: 1150273)
<লি> 1.
<লি> 1. - পাইথন করুন
<লি> বিল্ড পতাকার সহজতর সংজ্ঞা করুন
<লি> সংকলন সময় কিছু সতর্কবার্তা ত্রুটিমুক্ত.
ঝনঝন শব্দ ব্যবহার -fstack-অভিভাবক পরিবর্তে -fstack-অভিভাবক-শক্তিশালী <লি>
<লি> ধারণা আইডিই প্রকল্প ফাইল উপেক্ষা করুন
<লি> Math.hpp এর Refactoring করুন
<লি> minieigen বাইরের বাক্স বাধ্যতামূলক.
<লি> শুধুমাত্র জিসিসি & জি.টি. জন্য -fstack-অভিভাবক-শক্তিশালী করো; = 4.9
<লি> ViscElCap কিছু মেট্রিক-ব্যবস্থা সেট করুন.
<লি> যোগ প্রত্যাবর্তন frounding-গণিত পতাকা করুন
<লি> CMAKE_INSTALL_PREFIX দ্বারা INSTALL_PREFIX প্রতিস্থাপন করুন
<লি> Yade BOOST_PYTHON_FUNCTION_OVERLOADS ম্যাক্রো অবচিত সরান.
<লি> ষড়্ভুজাকার প্যাকিং ফিক্স, অবাঞ্ছিত করা উচিত নয় ওভারল্যাপ কোন.
<লি> Serializable.hpp আরো পাঠযোগ্য.
<লি> অবচিত পরামিতি সরান.
<লি> সরান STLReader STLImporter মধ্যে
TU Freiberg এ <লি> +1 টি মাস্টার থিসিস.
শরীরের অপসারণের পর কথাবার্তাও রপ্তানি-VTK দ্বারা <লি> ফিক্স ক্র্যাশ.
<লি> ViscoelasticPM বিভক্ত বর্ণনা এটা আরো পাঠযোগ্য করতে.
<লি> যাক একই ঝাড় এর clumpMembers মধ্যে পারস্পরিক ক্রিয়ার অস্তিত্ব.
<লি> SPH-ঝাড় বল হিসাব কর করুন
<লি> বিশ্বাসযোগ্য উবুন্টু 14.04 এ CGAL সম্পর্কে সতর্কীকরণ যোগ করুন
<লি> প্রাক এর preprocessor ডিরেক্টিভের ISC_TIMING করো.
<লি> উবুন্টু 12.04 সঠিক সমর্থনে ছাড়ুন
<লি> timpovall / মাস্টার থেকে টান অনুরোধ # 46 মার্জ করুন
<লি> InsertionSortCollider এর অ আক্রমণকারী refactoring করুন
<লি> প্রত্যাবর্তন পূর্ববর্তী কমিট.
<লি> 14.04 তে CGAL সঙ্গে সংকলন ঠিক করার জন্য একটি দ্বিতীয় বিকল্প যোগ করুন
<লি> অতিবৃদ্ধ বুস্ট সঙ্গে অবচিত কোড মুছে ফেলুন.
<লি> কৈশিক ফেজ জন্য স্যাঁতসেঁতে সান্দ্র বাস্তবায়ন.
ঝাড় সদস্যদের মধ্যে <লি> ফিক্স SPH বল হিসাব.
QGLViewer & জি.টি. সঙ্গে <লি> ফিক্স সংকলন; = 2.6.3 করুন
<লি> Qt5-বিল্ড তৈরী.
<লি> gqlviewer-qt4 বিরুদ্ধে ফিক্স সংকলন.
<লি> পরীক্ষা-স্ক্রিপ্ট থেকে সমস্যাটি দূর করুন
<লি> ফোন: +1 সম্মেলনে করুন
<লি> Qt5 প্রথম ধাপ.
<লি> Qt5 বিল্ড তৈরী.
<লি> কারণে Qt5 যাও আপডেট পাইথন ফাইল.
<লি> Qt5 দিকে কিছু আপডেট.
<লি> Qt5-মাইগ্রেশন alsmot সমাপ্ত হয়.
<লি> Qt5 সংকলন ত্রুটিমুক্ত.
<লি> Qt5 ফিক্স ক্র্যাশ.
<লি> QThread সমস্যা ফিক্স.
<লি> Qt5 বিরুদ্ধে সংকলন সম্পর্কিত তথ্য যোগ করুন.
<লি> TesselationWrapper নিখোঁজ ফাংশন যোগ করুন
<লি> কিছু অব্যবহৃত হেডার এবং defs সরান.
<লি> ফিক্স সংকলন OpenMP অক্ষম হয় তাহলে
সর্বশেষ চালু <লি> ফিক্স সংকলন কমিট.
<লি> কণা 2015 সালে রাখা, টক যোগ করুন
<লি> বালিঘড়ি উদাহরণস্বরূপ যোগ করুন
<লি> রিলিজ ফাইল যুক্ত করো.
<লি> ScGeom6D আপেক্ষিক ঘুর্ণন সংরক্ষণ (অচিহ্নিত করুন & quot; nosave করুন & quot;) এটি সঠিকভাবে পুনরায় লোড করার জন্য প্রয়োজন বোধ করা হয়, যেহেতু .
<লি> CohesiveFrictionalInteractions: সরানো & quot; nosave করুন & quot; যোগাযোগ মুহূর্তের জন্য পতাকা করুন
<লি> +1 টি জার্নাল কাগজের করুন
<লি> +1 টি জার্নাল কাগজের করুন
<লি> কথাবার্তাও আবর্তনশীল কঠিনতা ফিরে একটি ভার্চুয়াল ফাংশন যোগ - ওভারলোড না হলে শূন্য ফিরে করুন
<লি> GlobalStiffnessTimeStepper মধ্যে কথাবার্তাও আবর্তনশীল কঠিনতা জন্য অ্যাকাউন্ট
<লি> পর্যায় বিসিএস এ কণার বেগ গ্রেডিয়েন্টের স্পিন প্রয়োগ করুন
<লি> ছোট টাইপো করুন
<লি> যোগ বই অধ্যায়
<লি> ইনস্টলেশন: http://www.yade-dem.org/packages একটি বহিস্থিত গ্রন্থাগারের জন্য প্রয়োজনীয় (? Eigen বা এখন নিশ্চিত না cgal) হয়
<লি> পর্যায় বিসিএস গতিসম্পর্কিত শক্তি জন্য fluctuational বেগ / স্পিন আরো সঠিক defintion করুন
<লি> আইডি জন্য ভলিউম সঠিক মান
সংস্করণ 1.12.0 নতুন আপনি কি:.
<লি> checkClumpHopper autotest করো.
পুরো ঝাড় অপসারণের পর <লি> ফিক্স ক্র্যাশ.
<লি> ViscoelasticPM মধ্যে massR এর ফিক্স হিসাব করুন
<লি> ViscoelasticPM এ সি এস গণনা ফিক্স করুন
<লি> ViscElPM আরো এক সময় ঠিক করুন.
<লি> মুছে ফেলার জন্য clump`s memberIds একটি অ্যারের তৈরি করুন.
<লি> অবচিত ফাংশন থেকে কাল্পনিক মূল্য ফেরত.
<লি> computeForceTorqueViscEl মান returnin সম্মান করুন
<লি> আপডেট Schwager2007 ইউআরএল করুন
<লি> আরও একটি কাগজ যোগ করুন
<লি> fifthguy / মাস্টার থেকে টান অনুরোধ # 44 মার্জ করুন
<লি> PyRunner করতে firstIterRun পরামিতি যুক্ত করো.
<লি> সিস্টেম কল করুন & quot; স্পিংক্স-বিল্ড করুন & quot; পরিবর্তে পাইথন মডিউলের.
<লি> PeriodicFlow.hpp ফিক্স সংকলন ত্রুটি করুন
<লি> সেট পাইথন সংস্করণ স্পষ্টভাবে.
<লি> .hpp মধ্যে _utils.cpp এর পদক্ষেপ ফাংশন ঘোষণা করুন
ডিবাগ মোডে এবং OpenMP ছাড়া <লি> ফিক্স রানটাইম এরর.
<লি> ড্রপ & quot; yade / করুন & quot; সিপিপি ও hpp ফাইল ফোল্ডার.
<লি> ফিক্স ডক্স-প্রজন্মের.
<লি> SPH-কোড refactoring.
VTK জন্য <লি> ব্যবহার শুধুমাত্র vtkCommonCore vtkIOImage vtkIOXML উপাদান.
<লি> ব্যবহার পাইথন 2.7 শুধুমাত্র
<লি> SPH-modell মধ্যে পুনঃপ্রবর্তন সান্দ্রতা.
<লি> রিলিজ ফাইল যুক্ত করো.
<লি> ব্রুনো Chareyre (33):
<লি>-অন্তর্ভুক্ত UnsaturatedEngine Chao এর কাজ করুন শুরু করার
<লি> কয়েক ভুল ঠিক করা এবং একটি (খালি না) বাস্তব পরীক্ষা ফাংশন করতে
<লি> - দৃশ্যের অবস্থানের হাতে নির্ধারিত অবস্থানকে প্রতিস্থাপন করুন
<লি> chaoUnsat মধ্যে https://github.com/yade/trunk শাখা 'মাস্টার' মার্জ করুন
<লি> unmaintained এবং (ফাংশন সাময়িকভাবে কিন্তু ফিরে ত্রুটি রাখা) makeCloud দ্বারা অবচিত pack.particleSD এবং ভিন্নতা, অপসারণ
<লি> https://bugs.launchpad.net/yade/+bug/1362090 ঠিক করুন
<লি> https://bugs.launchpad.net/yade/+bug/1308074 ঠিক করুন
<লি> https://bugs.launchpad.net/yade/+bug/1368591 + একটি অনর্থক পরীক্ষা অপসারণ ঠিক করুন
<লি> https://github.com/yade/trunk/commit/4ea76ad6e47ac5074a389ad61712a0840e8560a5 ভাল ফিক্স, ধন্যবাদ আন্তন
<লি> পুরানো কথাবার্তাও সমান্তরাল অপসারণের করুন
<লি> GravityEngine গম্ভীরতা জ্ঞাপক জন্য LOG_WARN দ্বারা LOG_ERROR প্রতিস্থাপন করুন
<লি> (https://bugs.launchpad.net/yade/+bug/1368591 ঠিক) parrallel Collider মধ্যে 1-থ্রেড ফিরে অধ উন্নত
<লি> পর্যায় PFV ভুল ব্যাপ্তিযোগ্যতা ফলে বন্ধনী অনুপস্থিত ফিক্স করুন
<লি> CohesiveFrictional যোগাযোগ আইন আংশিক ব্যাখ্যার জন্য Bourrier2013 বিন্দু করুন
<লি> requestErase সংক্রান্ত ফিক্স ডক () - https://bugs.launchpad.net/yade/+bug/1370736, ধন্যবাদ জানুয়ারি করুন
<লি> FlowEngines মধ্যে জাল কোষের নির্বাচনী ব্লক (প্রাথমিক ধাপ)
<লি> খালি ফাইল অপসারণ করুন
<লি> PFV: অবরুদ্ধ কোষ জন্য Perm হিসাব লাফালাফি, এখনো না
<লি> ফিক্স ফাইলের নাম
<লি> ভুল ফাইলের নাম দিয়ে সিপিপি অপসারণ করুন
<লি> erased সংস্থা আইডি রিসেট করুন; এই সক্রিয়: B = দেহ (); O.bodies.erase (O.bodies.append (B)); O.bodies.append (B)
<লি> ত্রুটি বার্তা থেকে UserWarning (প্রদর্শন) মধ্যে DeprecationWarning (প্রদর্শিত না) চালু যেখানে রহস্যপূর্ণ করুন
<লি> PFV অবরুদ্ধ কোষের কোন ইন্ডেক্স
<লি> PFV কোষ ব্লক ভারবোসিটি হ্রাস করুন
হাড় ভেঙ্গে JCFPM তাদের + অতিরিক্ত বৈশিষ্ট্যাবলী পৌঁছানোর হিসাবে <লি> DFNFlow কোষ মুক্ত করুন
<লি> বিভক্ত resetNetwork এবং resetLinearSystem + যুক্ত আরও লোক / সেটার করুন
<লি> সন্তানের ইঞ্জিন অন্তর্ভুক্তির জন্য hpp / সিপিপি মধ্যে বিভক্ত TwoPhaseFlowEngine করুন
<লি> OpenMP ফাংশন জন্য #ifdef গার্ড করুন
সনাক্ত করুন & quot; মান (আরো নমনীয়) + একটি ফাংশন ফিরে কেন্দ্রের + উন্নত করুন & quot আরম্ভের সময় <লি> আরোপিত তরল চাপ মুছে ফেলা হয় না; ক্ষেপক জন্য
<লি> FlowEngine এর এ মনোরম তরল চাপ বৃদ্ধি নমনীয়তা
<লি> TwoPhaseFlowEngine জন্য বিশেষ লোক / সেটার এর + UnsatEngine কোষ কোন পুনরায় ইন্ডেক্স
TwoPhaseFlowEngine জন্য <লি> ভাল # Def / # Ifdef যুক্তিবিজ্ঞান করুন
<লি> cellCenter- & জি.টি. নামান্তর; cellBarycenter (. পূর্ববর্তী নিখোঁজ কমিট)
<লি> চাও ইউয়ান (86):
<লি> - নিষ্কাশন সিমুলেশন আমার প্রথম কাজ করুন
<লি> নিষ্কাশন জন্য প্রথম কাজ কোড কমিট করুন
<লি> - এখানে ধ্রুবক আরো নমনীয় (addBoundaries একটি প্যারামিটার) করতে
<লি> অ্যাড poreRadius করুন
<লি> -a পরীক্ষা বড় জগাখিচুড়ি অব্যাহতি কমিট ...
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> অ্যাড UnsatCellInfo, UnsatVertexInfo করুন
<লি> পরিষ্কার কোড
<লি> লোমকূপ সংযোগের জন্য অ্যাড টেম্প ফাংশন
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> -আপডেট সীমানা বৈশিষ্ট্যাবলী
<লি> ল্যাপটপ -a ব্যাকআপ করুন
<লি> অ্যাড ভবিষ্যতে ব্যবহারের জন্য UnsatVertexInfo (অকার্যকর)
<লি> টেস্ট কমিট করুন
<লি> টেস্ট কমিট করুন
<লি> chaoUnsat মধ্যে দূরবর্তী-ট্র্যাকিং শাখা 'উৎপত্তি / chaoUnsat' মার্জ করুন
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> -পরিচ্ছন্ন কোড
<লি> cellinfo মধ্যে capillaryCellVolume যোগ, নিখুত getSaturation ()
<লি> প্রতিস্থাপন cell- করুন & gt;. IsAir / WaterReservoir সাথে তথ্য () P
সেল ইনফো
<লি> পরিষ্কার code.add কর্ম ()
<লি> মোড 2 জন্য getSaturation2 () যোগ করতে পারেন.
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> FlowEngine থেকে saveVTK ধার
<লি> দুটি মোড আক্রমণ স্বাভাবিক.
<লি> computeForce ঐচ্ছিক করা; একটি bakcup করুন
<লি> একটি অস্থায়ী পরিবর্তন, সংরক্ষণ waterReservoir = বাউন্ড [2], যোগ invadeBounday বিকল্প
সীমানা ঐচ্ছিক থেকে -করুন আক্রমণ <লি>. (ডিফল্ট মিথ্যা)
<লি> ফিক্স নেটওয়ার্ক Line_Solid_Pore ().
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> বিগ পরিবর্তন ও FlowEngine থেকে উত্তরাধিকারী.
<লি> অপসারণ পুরোনো ফাইল
<লি> পরিষ্কার কোড
<লি> ফিক্স বল হিসাব.
<লি> Compute নির্দিষ্ট interficial এলাকায় যোগ, বাগ প্রচুর ...
<লি> fictious প্রান্তবিন্দু ব্যবহার করে ফিক্স computeCellInterfacialArea করুন
<লি> test. কোন বড় পরিবর্তন.
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> ফিক্স 'পাইথন' ঘোষণা বাগ করুন
<লি> ডিবাগ কিছু তথ্য -পরিচ্ছন্ন করুন
ComputerForcePoreForceWithCache
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> PFV সাথে আপডেট করুন
BndCondValue জলাধার চিহ্নিত ব্যবহার করুন
<লি> ফিক্স getWindowsSaturations.
<লি> অ্যাড লোমকূপ ব্যাসার্ধ চেক funcs (TMP)
ComputePoreRadius জন্য <লি> -পুনঃনামকরণ ভেরিয়েবল (); পরিষ্কার কোড.
<লি> -পরিচ্ছন্ন কোড
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> অ্যাড debugOut পরীক্ষা isInvadeBoundary = সত্য isPhaseTrapped = সত্য
<লি> -সন্নিবেশ debugOut. (Ulimit দ্বারা নির্দিষ্ট কোর ডাম্প 16000 -s)
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> -merge TwoPhaseFlowEngine, আরো সেল infos যোগ করুন.
<লি> github.com:yade/trunk শাখা 'মাস্টার' মার্জ করুন
<লি> অ্যাড savePhaseVtk. ফাংশন নামান্তর.
<লি> সরান চেক cell.index করুন
<লি> github.com:yade/trunk শাখা 'মাস্টার' মার্জ করুন
<লি> মন্তব্য # define TWOPHASEFLOW করুন
<লি> খৃস্টান জ্যাকব (6):
<লি> TriaxialStressController ঢোকান updatePorosity বিকল্প
<লি> GitHub ডক দীর্ঘ লাইন ঠিক করুন
<লি> NewtonIntegrator মধ্যে একটি সতর্কবার্তা ছোট ফিক্স করুন
<লি> introduction.rst ডক গৌণ ফিক্স করুন
<লি> undrained প্রবাহ অবস্থার জন্য টিএসসি জন্য তরল কঠিনতা অন্তর্ভুক্ত করুন
FlowEngine নিষ্ক্রিয় করা হয় যখন টিএসসি জন্য <লি> ফিক্স fluidStiffness করুন
<লি> ডমিনিক Boemer (1):
<লি> ViscoElasticPM জন্য চেক-স্ক্রিপ্ট যোগ করুন.
<লি> ফ্রাঁসোয়া (1):
গ্রিডের জন্য <লি> সঠিক যোগাযোগ ট্র্যাকিং বাগ. তারা essencially বুলিয়ান ফিরে আছে যে আইন নতুন যুক্তিবিজ্ঞান থেকে এসেছেন.
<লি> জানুয়ারী Stransky (7):
VTKRecorder (প্রশ্ন # 252413) থেকে <লি> যোগ বল এবং টর্কে রপ্তানি করুন
<লি> utils.polyhedron ফাংশন টাইপো সংশোধন করুন
<লি> Polhedron এবং চারি পর্যায় সিমিউলেশানে সচল
<লি> PolyhedraVolumetricLaw নামান্তর - & gt; Law2_PolyhedraGeom_PolyhedraPhys_Veolumetric করুন
<লি> বাক্সে জন্য বাহিনীর মোছা VTK আউটপুট (বাগ # 1376734)
<লি> polyhedra :: GetSurfaces ফাংশন যোগ
<লি> Law2_PolyhedraGeom_PolyhedraPhys_Volumetric যোগ করা volumePower অ্যাট্রিবিউট, polyhedra কোড ছোট পরিষ্করণ করুন
<লি> Janek Kozicki (2):
<লি> সম্পাদনার মান যে 'পরিদর্শন' এ বাগ ফিক্স বিরক্তিকর.
<লি> ডক / references.bib মধ্যে ডক / স্পিংক্স / references.bib মার্জ করুন
<লি> জেরোম Duriez (3):
<লি> & quot পুনরায় লিখুন; গিটহাব & quot Yade; স্পিংক্স ডক উইকি পাতা.
<লি> অবোধ্য JCFpm paraview বিশ্লেষণ করুন জন্য একটি দরকারী লিংক (কোড মন্তব্যে) একটি ট্র্যাক রাখা প্রতিজ্ঞাবদ্ধ
<লি> শেষ উইকি লিঙ্ক অপসারণ প্রথম ফাইল GitHub সংক্রান্ত
<লি> রাফায়েল Maurin (1):
<লি> Thinkpad (1):
<লি> -a পরীক্ষা করুন ল্যাপটপ থেকে কমিট
<লি> cyuan (7):
<লি> চেক জলাধার boundingCells জন্য একটি ছোট পরিবর্তন.
<লি>, নমুনা উইন্ডোজ উৎপাদিত হিসাবী জন্য অ্যাড টেম্প ফাংশন সাড়া সম্পৃক্তি ...
<লি> অ্যাড savePhaseVtk করুন
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> প্রতিস্থাপন ABS, সর্বোচ্চ, সর্বনিম্ন এসটিডি দ্বারা :: ABS, এসটিডি :: ম্যাক্স, এসটিডি :: মিনিট
<লি> chaoUnsat মধ্যে github.com:yade/trunk মার্জ করুন
<লি> cyuanLaptop (1):
<লি> -পরিবর্তন debugOut করুন
<লি> fifthguy (1):
<লি> উদাহরণ থেকে uniaxial-post.py স্ক্রিপ্ট চালানোর সময় উপস্থিত একটি বাগ সংশোধন করা হয়েছে. Minieigen থেকে Vector3 ইম্পোর্ট করার সময় সম্পাদিত PY / post2d.py ব্যতিক্রম ক্যাপচার.
<লি> jduriez (12):
<লি> (পাইথন এ মিথ্যা মিথ্যা =) monodisperse packings সাথে একটি ত্রুটি ব্যবহার করে PSD () এর সংশোধন. একটি ব্যাখ্যামূলক বার্তা যোগ করুন
<লি> কয়েক কৈশিক ডক পরিবর্তন: নাল ভেজানো কোণ, হাইপারলিঙ্কস ধৃষ্টতা, এবং সোর্স কোড মধ্যে কিছু মন্তব্য করুন
<লি> পূর্ববর্তী সময় এক বিস্মৃত পরিবর্তনের TriaxialStressController 3DTriaxialEngine সম্পর্কে কমিট? https://github.com/yade/trunk/commit/77bc6d75b780bcbad5bdadc5bb3645badb009cd9 করুন
<লি> বিভিন্ন ফাইল সংরক্ষণ ধরণের উল্লেখ যোগ করার পদ্ধতি. আমি রঙপেন্সিল ইউস করতাম তাহলে সংশোধন করুন, পার্থক্য মন্তব্য করার চেষ্টা করুন
কৈশিক ডক
<লি> ছিদ্রতা () ফাংশন বরং একটি ত্রুটি নিক্ষেপ আর, এখন অপর্যায়বৃত্ত ক্ষেত্রে একটি ভলিউম মূল্য infers. অবশেষে যুক্তি হিসেবে পাস Positiv ভলিউম মান এই অনুমিত নির্দেশটি বাতিল করুন
<লি> ছিদ্রতা ডক অনুযায়ী পরিবর্তন পূর্ববর্তী কমিট করুন
<লি> getStress () এখন অপর্যায়বৃত্ত ক্ষেত্রে (প্যারামিটার হিসেবে পাস মান এখনও বিবেচনায় নেয়া যেতে পারে) জন্য পর্যাপ্ত ভলিউম মূল্য বিবেচনায়
<লি> পুনরায় প্রবর্তন, https://github.com/yade/trunk/commit/ab91b3cf8654f6d563dede10184e784a8ce84219 থেকে পরিবর্তন দেখাও কারণ ছাড়াই করুন প্রতিস্থাপন রোধ
<লি> অ মেয়াদী ক্ষেত্রে getStress ভলিউম গুনতি সংক্রান্ত https://github.com/yade/trunk/commit/05599b23808991dbfef6b85400c7ddd32be594e0 উন্নতিসাধন করুন
<লি> CapillaryPhys ডক টাইপো করুন
<লি> ইন্টারঅ্যাকশন Parallelization (আসলে না InteractionLoop দ্বারা পরিচালিত একটি LawFunctor যা) Law2 _..._ কৈশিকতা মধ্যে loops. তাছাড়া অ সমান্তরাল গন্ধ জন্য foreach ইটারেটরের দত্তক.
সংস্করণ 1.07.0 নতুন আপনি কি:.
<লি> ব্যবহার সম্পর্কে নোটিশ যোগ libqglviewer-qt4-dev পুরোনো উবুন্টু সংস্করণ পরিবর্তে libqglviewer-দেবের.
<লি> পিপিএ-প্যাকেজ তৈরি স্ক্রিপ্ট যোগ করুন. (সমাপ্ত না)
<লি> ফিক্স ভলিউম হিসাব. বন্ধ এলপি: 1261415 করুন
<লি> yade-ব্যাচে স্ব-কম্পাইল মডিউল sys.path উচ্চতর pripority সেট করুন.
পিপিএ জন্য <লি> আপডেট স্ক্রিপ্ট.
<লি> যোগ কনফিগারেশন ফাইল, পিপিএ জন্য প্রয়োজন.
<লি> পিপিএ স্ক্রিপ্টের মাইনর আপডেট.
<লি> yadedaily Prebuilt প্যাকেজ সম্পর্কে তথ্য আপডেট করা হবে.
<লি> qglviewer & জি.টি. জন্য সমর্থন যোগ করুন;. = 2.5.0 করুন
<লি> প্যাকগুলি খুলুন গ্রাফিক্যাল ইউজার ইন্টারফেস / packs.py 1 ধাপ পরে সব উপাদান দেখানোর জন্য.
<লি> কারণে সান্দ্রতা যাও ViscPM মধ্যে প্রতিরোধ আকর্ষণ বাহিনী
<লি> checkWeight-স্ক্রিপ্ট আরো কিছু পদক্ষেপ করো.
রেফারেন্স
<লি> হিসাবে এটি ছিল utils.growParticles () এর পাইথন মোড়ানো পুনঃস্থাপন আগে fb02a74 (ভুল করে পরিবর্তন, দুঃখিত খৃস্টান)
<লি> trangulation কক্ষে অনন্য শনাক্তকারী দিতে করুন
<লি> FlowEngine :: nCells সসীম কোষের সংখ্যা retruns; FlowEngine :: getVertices তার আইডি দ্বারা সংজ্ঞায়িত একটি কক্ষের ছেদচিহ্ন ফেরৎ করুন
<লি> LinSolv জন্য নির্ভরতা অনুপস্থিত যখন cmake আউটপুট আরও বেশি সঙ্গতিপূর্ণ করতে
<লি> FlowEngine.updateTriangulation = সত্য আচরণ ত্রুটিমুক্ত করুন
<লি> FlowEngine: সঠিকভাবে একটি পাল্টা বাড়ায়
<লি> suitesparse ও সংশ্লিষ্ট লিব সংক্রান্ত ইনস্টলেশন বিভাগে ছোট পরিবর্তন করুন
<লি> installation.rst: খাঁজ মধ্যে smallfix করুন
এটা STL একটি গুরুতর বাগ আরম্ভ হিসাবে <লি>, FlowEngine একটি প্রয়োজন না শ্রেণীবিভাজন অপসারণ (http://gcc.gnu.org/bugzilla/show_bug.cgi?id=58800)
<লি> DEM এর PFV সঠিক লক্ষ্য মান checktest করুন
অনলাইন <লি> ফিক্স পাথ এবং প্যাকেজ ডকুমেন্টেশন (গ্রাফিক্যাল ইউজার ইন্টারফেস এর হাইপারলিংক সঙ্গে ফিক্স URL ত্রুটি)
<লি> DEM এর পৃষ্ঠভূমি অধ্যায়: যোগাযোগ গতিবিদ্যা জন্য স্থানচ্যুতি বনাম শব্দার্থিক স্ট্রেন একটি নোট করুন
<লি> github.com:yade/trunk শাখা 'মাস্টার' মার্জ করুন
কী জন্য & quot; <লি> অনির্ধারিত করুন & quot ঠিক; triax-টিউটোরিয়াল / script-session1.py করুন
<লি> +1 টি প্রকাশিত কাগজের করুন
<লি> একটি উদাহরণ স্ক্রিপ্ট ছোট ফিক্স চারি / oneTetra.py করুন
<লি> ViscElPhys মধ্যে REGISTER_CLASS_INDEX (...) অনুপস্থিত ত্রুটিমুক্ত. এই ম্যাক্রো একটি সঠিক আইন প্রেরণ জন্য অপরিহার্য!
<লি> কোড মন্তব্য একটি ছোটখাট ভুল সংশোধন: K = 2 * R * ই করুন
<লি> frictPhys হিসাবে (coh) frictMat এবং viscElMat মধ্যে যোগাযোগের অনুমতি দিন. প্রায় সবকিছু ঠিক উপাদান উপযুক্ততা নিশ্চিত করতে stiffnesses করতে মডিউলস করতে stiffnesses এবং মডিউলস রূপান্তর ছিল, উত্তরাধিকার দ্বারা সম্পন্ন হয়. মুহূর্তে timeStepper এই সিমিউলেশানে ধরনের হ্যান্ডেল করতে পারে না দয়া করে নোট - & gt; শীঘ্রই সংশোধন করা হবে.
<লি> পরিমিত ত্রুটি বার্তা যদি না yade.runtime.hasDisplay (বাগ # 1241817)
<লি> পূর্ববর্তী থেকে বাক্যগঠনের সংশোধন কমিট করুন
<লি> uncomment এবং পরিবর্তন utils.forcesOnCoordPlane ফাংশন
উদাহরণ / পরীক্ষা / triax.py করুন
<লি> JCFpm কোড অত্যন্ত গুরুত্বপূর্ণ পরিবর্তন করুন
<লি> তারা এখনও আগের পরে কাজ কমিট যাতে পরিবর্তন JCFpm উদাহরণ স্ক্রিপ্ট
<লি> getStress () ফাংশন, ডক মধ্যে কিছু পরিবর্তন সোর্স কোড সঙ্গে সামঞ্জস্যপূর্ণ হতে (https://answers.launchpad.net/yade/+question/239919)
<লি> github.com:yade/trunk শাখা 'মাস্টার' মার্জ করুন
<লি> পূর্ববর্তী হিসাবে একই কমিট করুন
GrowParticle এর 2D সংস্করণ পুনরুদ্ধার <লি> পূর্বে ভুল করে মুছে ফেলা ..
<লি> JCFpm ডক মধ্যে কিছু হাইপারলিঙ্কস সংশোধন করুন
<লি> টাইপস এবং Peri3dController ডক সংশোধন হাইপারলিঙ্কস করুন
<লি> TesselationWrapper একটি লিঙ্ক কারেকশন () ডক করুন
<লি> CGAL লিংক যোগ এবং তালিকা ইনস্টল থেকে libgmp3 মুছুন
<লি> স্বাভাবিক এবং স্পর্শকতুল্য শক্ত হয়ে যাওয়া এবং স্যাঁতসেঁতে হিসাব পরিবর্তন. দুটি প্যারামিটার এক, যেমন শূন্য হয় পরিবর্তন শুধুমাত্র আচরণ প্রভাবিত বিভিন্ন কঠিনতা K1 এবং K2 সঙ্গে দুটি কণার জন্য, যোগাযোগের কঠিনতা সবসময় K = K1 * K2 / (K1 + + K2) হতে হবে. এটা ছাড়া একই দানের পূর্বেই যখন K2 = এটা K = K1 (রেস্প. K = K2) দিয়েছে যেখানে 0 (যথাক্রমে K1 = 0),. এই দুটি প্যারামিটার এক শূন্য ঝোঁক যখন আচরণ মধ্যে ধারাবাহিকতা নিশ্চিত করার জন্য কাজ করা হয়. কোড অনুলিপি এড়াতে Ip2_ViscElMat_ViscElMat_ViscElPhys একটি ফাংশন contactParameterCalculation করো.
আপনি কি সংস্করণ 1.05.0 নতুন:
<লি> ফিক্স সংকলন.
<লি> ডকুমেন্টেশন থেকে স্থিতিশীল-পিপিএ রেফারেন্স সরান.
<লি> সব libboost প্রতিস্থাপন - * -. Libboost-সব-দেব দেব করুন
<লি> খৃস্টান জ্যাকব:
<লি> ব্যবহারকারীদের মধ্যে ঝাড় পদ্ধতির সম্পূর্ণ বিবরণ ম্যানুয়াল
<লি> নিষ্ক্রিয়তা টেন্সর পড়তা স্কিম মধ্যে একটি বাগ ফিক্স করুন
<লি> ব্যবহারকারীদের ম্যানুয়াল এবং সিন ডক করুন কিছু লিঙ্ক ঠিক
<লি> ব্যবহারকারীদের মধ্যে ডিফল্ট উপাদানের ফিক্স বিবরণ ম্যানুয়াল
ব্যবহারকারী ম্যানুয়াল
<লি> ঝাড় :: updateProperties আপডেট: integrateInertia এবং int discretization bool, নতুন অন্তর্ভুক্ত এবং ঝাড় (), appendClumpend (), addToClump (), releaseFromClump (), replaceByClumps () এবং growParticles () মানিয়ে করুন
<লি> লেফাফা কিছু উদাহরণ স্ক্রিপ্ট লিঙ্ক তৈরি করুন
উদাহরণ / প্যাকগুলি / packs.py এর <লি> বৃদ্ধি আরম্ভের গতি (https://bugs.launchpad.net/yade/+bug/1229783 ঠিক)
<লি> (এখনও ভাঙ্গা) ব্যবহারকারীদের মধ্যে refs ঠিক করার চেষ্টা ম্যানুয়াল
<লি> github.com:yade/trunk শাখা 'মাস্টার' মার্জ করুন
<লি> getRoundness () আরো নমনীয় করা: খালি excludeList আরো ইনপুট আর্গুমেন্ট হিসাবে প্রয়োজন নেই; ব্যবহারকারীদের মধ্যে replaceByClumps-example.py এবং যুক্ত অংশ মানিয়ে ম্যানুয়াল
ব্যবহারকারী ম্যানুয়াল
<লি> TesselationWrapper একটি লিঙ্ক ঠিক করুন
<লি> (চেষ্টা দ্বিতীয়) TesselationWrapper একটি লিঙ্ক ঠিক করুন
<লি> বোঝায় জন্য ফিক্স প্লবতা উদাহরণ
Polyhedra.cpp থেকে <লি> মুছে typenames, জিসিসি ও লে করতে; সংস্করণ 4.7 শুভ
<লি> দনিয়া:
<লি> কণা আপেক্ষিক বেগ সংরক্ষণ করুন.
<লি> কম্পিউট edgesSurfaces viscousShear সত্য হলে.
<লি> github.com:yade/trunk শাখা 'মাস্টার' মার্জ করুন
<লি> (VTKRecorder এবং export.VTKExporter করার) যোগ পর্যায়ক্রমিক সেল VTK রপ্তানি করুন
<লি> github.com:yade/trunk শাখা 'মাস্টার' মার্জ করুন
<লি> বিস্মৃত যোগ করা হয়েছে যেমন ফাইল
<লি> এক আগের দেননি থেকে export.VTKExporter স্থির বাগ করুন
<লি> github.com:yade/trunk শাখা 'মাস্টার' মার্জ করুন
(জানুয়ারী ইলিয়াস দ্বারা সরবরাহিত) <লি> polyhedra বাস্তবায়ন 'উদাহরণ.
<লি> নতুন বহুতলক বর্গ দ্বারা স্থাপিত tetrehadron সঙ্গে যোগ উদাহরণ
<লি> CombinedKinematicEngine তার 'মৃত' subengines (প্রশ্ন # 237437) কল করা হবে
<লি> জেরোম Duriez:
<লি> মন্তব্যে টাইপো সংশোধন করুন
<লি> JCFpm ক্লাস ব্যবহার করে নতুন (একই কিন্তু আরো কম্প্যাক্ট) উদাহরণ কয়েক প্রস্তাবনা. একটি পছন্দের কিছু প্রতিক্রিয়া পরে একদিন করা যাবে?
<লি> JCFpm ডকুমেন্টেশন কিছু পরিবর্তন (এইচ এর যোগ, এবং বর্তমানে উপস্থিত নেই যা CFpm মডেল দিকে ক্রস রেফারেন্স অপসারণের). সিপিপি, কিছু মন্তব্য লাইন (ভবিষ্যতে?) যোগ করতে হতে পারে বর্তমান বিরতি পারে যে কিছু পোস্ট-প্রো বৈশিষ্ট্য বর্তমান ব্যবহারকারীদের (?? বিদ্যমান) এর সংরক্ষণ
<লি> https://lists.launchpad.net/yade-dev/msg09979.html সংক্ষিপ্তভাবে আলোচনা পরিবর্তন Commiting. প্রধানত এল Scholtes দ্বারা লিখিত, তারা paraview সঙ্গে JCFpm ক্লাস কিছু বৈশিষ্ট্য vizualize করার অনুমতি দেয়. এর পরে 2 recorder ও & quot যোগ; jcfpm করুন & quot; এবং & quot; তারা যে কোনভাবে এখন নথিভুক্ত করা হয় .. প্রধানত ঐতিহাসিক কারণে বিভক্ত করা হয় যে ফাটল & quot ;, করুন
<লি> যে yade (এখানে, এমনকি চক্রান্ত উইন্ডো বন্ধ করার পরে) এই ফাংশন প্রবর্তনের পর আর স্তব্ধ করে না, তাই plotNumInteractionsHistogram মধ্যে pylab.ion () () এবং plotDirections () এর করো. এখনও Vaclav ধন্যবাদ! (Http://stackoverflow.com/questions/9753885/pylab-matplotlib-show-waits-until-window-closes)
<লি> একটি উদাহরণ লিপিতে অবোধ্য পরিবর্তন করুন
<লি> ক্লস Thoeni:
<লি> GridConnection মধ্যে মাস্ক সংকল্পকে সমস্যা
<লি> Git স্থানীয় kdevelope নির্দিষ্ট ফাইল উপেক্ষা করুন
সংস্করণ 0.97.0 নতুন আপনি কি:
<লি> সিস্টেম pygts, যদি পাওয়া যায়.
<লি> 2.6 নিম্নতর প্রয়োজন cmake সংস্করণ
<লি> Tkinter ইনস্টল করা আছে কিনা চেক করুন.
<লি> 2.8 সংক্ষিপ্ত cmake সংস্করণ ফিরে ফিরে. গ্রাফিক্যাল ইউজার ইন্টারফেস সঙ্গে সংকলন ত্রুটি.
<লি> ফিক্স সংকলন বিরুদ্ধ 1.53 অনুমোদন.
Py_gts মডিউল অনুসন্ধানের
আবশ্যক :
1 মন্তব্য
محمدرضا 12 Jan 17
سلامشخص مسلط به این نرم افزار برای انجام پروژه لطفا تماس بگیرد
09188492669